�����http://m.by236.com������ҕ���vϵ�y�п��ƾW�j���OӋ(2)
��2�����ڌ���ʽ�̶��ӕr���Cͨ�ţ����ڲ��õIJ������Ĺ��c݆ԃ��ʽ���ƣ������ͨ�ŵĹ��c����ռ�þW�j�YԴ����W�j��Ч�����ʿ��ɹ��c�Ĺ̶��ӕr�r�g�͌��Hͨ�ŕr�g��Q��,�����ù�ʽ��2����ʾ��
 nextpage] nextpage]
����t�������c���Hͨ�ŕr�g��T��ʾ���cͨ�Ź̶��ӕr�r�g����Tһ���xȡ���ͨ�Ź���r�g��2���������ͨ�Ź���r�g�����nj��Hͨ�ŕr�gt��1��10������T=2t�rȡ���ֵ����T=20t�rȡ��Сֵ�����Ե�ȡֵ����һ����0.05��0.5֮�g��
��3�����ڌ���ʽ�ӑB�ӕr���Cͨ�ţ�����ͨ�Ź��c���ü��r�V��֪ͨ�@ȡͨ�ř��ޣ����Խ����J����ʽ��2����T=t�����Խ��ƞ�1��
ͨ�^���Ϸ������о��l�F��С�^��ҕ���vϵ�y�ӿ��ƾW�j�����九�c�Pϵ���s��ͨ�ŷ�ʽ���ӣ��ʌ���ʽ���Cͨ�ű����Ķ��Cͨ�Ÿ��m��������ͨ�^���W�j��Ч�����ʵķ����о����l�F����ʽ���Cͨ���ЄӑB�ӕr��ʽ�ȹ̶��ӕr��ʽ����Ч��
5.CAN��RS458���ƾW�j�Č��F
С�^��ҕ���vϵ�y�������x�Ǟ�ס���ṩһ�����M�����㡢��ȫ�����m�ĭh�����ڰ���ϵ�y����Ҏ��Ҫ��Ļ��A�ϣ��ںό��H���{���о��Y����ϵ�y�����ׂ�����Ĺ�������
(1)ϵ�y��ס���Ԫ�����T��Ԫ�����T��Ԫ����������Ԫ�M�ɡ�
(2)ϵ�y��4�����ƽM�ɣ������Ԫ���ơ����T��Ԫ���ơ����T��Ԫ���ơ�ס���Ԫ���ơ�
(3)ϵ�y���F�Ĺ����Ё����L�������й���T��ҕ�l�O������Ϣ�l�����Ȳ����С��T�ڿ�ҕ���v����ȫ���l���o�����С�
(4)ϵ�y���Ԍ��F�h���xͨ�ţ���Ҫ�r�ɼ���̖�Ŵ����^��Ԫ��
(5)ϵ�y�����`����{��
С�^��ҕ���vϵ�y�п��ƾW�jҪ�M�����;W�j�ď��s�Ժͽ��O�ɱ������]����ҕ���v�ӾW�j������ͨ��Ҫ���ݔ�^��������Ϣ��������“CAN��RS485”�����ķӽY����CAN�W�j����RS-485�W�j���όӾW�jʹ���������ƾW�j�����ԱȆΪ���CAN�W�j�����Դ��������ͬ�r�ȆΪ�����CAN�W�j�Ĺ��c�����U��ܶ࣬�@�N�Y�����ڿ�ҕ���v���ƭh�����m����
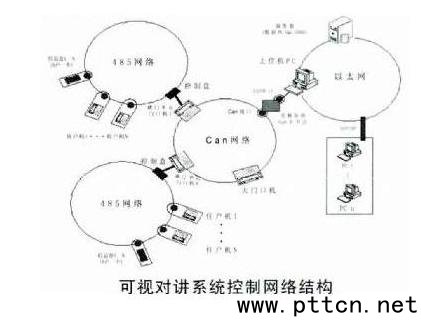
(1)���T�ڙC��N���T�ڙC��CAN�ӿ���CAN�W�j�B�ӡ�
(2)N���T�ڙC�ɿ��ƺ��B����485�W�j�ϣ�485�W�j����N��ס���C��
(3)��̫�W�B����λ�C���������������TCP/IP�ӿڡ�
6.С�Y
�������о�CAN������RS-485�����Ļ��A�ϣ��Y��С�^��ҕ���vϵ�y��Ҫ���F�Ĺ��ܣ��OӋ�����M��“CAN RS485”�ӾW�j�����F��С�^��ȫ���c�h�̂�ݔ�Ŀ���ϵ�y�W�j��ԓ���ƾW�j���܉����Ч�ĝM�㘋���������ɿ���С�^��ҕ���vϵ�y�����FС�^��ȫ��������Ϣ�ɼ���Ҫ��
(�Ї���Ⱥͨ�žW | ؟�ξ���ꐕ���) |



